كلب آلي يحقق حركة مذهلة على اليابسة والماء من خلال تقليد الثدييات
كشف فريق من العلماء عن اختراع مذهل يتمثل في كلب آلي يمكنه أن يتحرك بسلاسة سواء على اليابسة أو في الماء، هذا الكلب الروبوتي يشبه الثدييات في طريقة حركته، مما يجعله أكثر كفاءة في التنقل من نظائرته المستلهمة من الحشرات، تم نشر هذه الدراسة في مجلة Bioinspiration & Biomimetics، وهي تشير إلى تقدم ملحوظ في عالم الروبوتات.
يعتبر التصميم الجديد للكلب الروبوتي ثورة في عالم الروبوتات البرمائية، معظم الروبوتات الموجودة اليوم تعتمد على تصميمات الزواحف والحشرات، ولكنها غالبًا ما تعاني من مشاكل تتعلق بالتحركات السريعة والقدرة على التحمل، لكن مع الأخذ بعين الاعتبار تصميم الكلب الروبوتي، يمكنه التبديل بين الماء واليابسة بسهولة، مما يؤهله للتغلب على القيود التقليدية.
مزايا التصميم الفريد
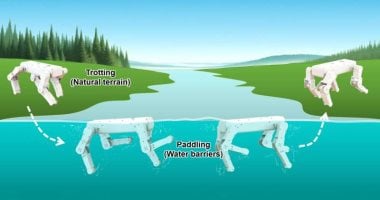
الروبوت يحتوي على آلية تجديف مبتكرة تستلهم حركة السباحة الطبيعية للكلاب، التركيب الهندسي المتوازن بين الوزن والطفو يضمن استقرار الأداء المائي، وقد تم اختبار الروبوت من خلال ثلاث طرق تجديف مختلفة: اثنتان تستلهمان من مجداف الكلاب، والأخرى تشبه أسلوب الهرولة، الذي يعزز الثبات أثناء السباحة.
أداء متميز
خلال التجارب، برزت طريقة التجديف المستوحاة من الكلاب بوضوح، حيث حقق الكلب الآلي سرعة تصل إلى 0.576 كيلومتر في الساعة في الماء، بينما أسلوب الهرولة يتيح مستويات أعلى من الثبات، وعلى اليابسة، تصل السرعة إلى 1.26 كيلومتر في الساعة، مما يفتح المجال لتطبيقات متعددة في البيئات البرمائية.
تطبيقات مستقبلية
هذا الابتكار ليس مجرد تقدم تقني، بل يمهد الطريق لمستقبل مشرق في مجالات البحث البيئي، المركبات العسكرية، ومهام الإنقاذ، الباحث يونكوان لي، الذي شارك في الدراسة، يؤكد أن هذه الخطوة تمثل قفزة إلى الأمام في التصميمات المبنية على مبدأ المحاكاة الحيوية.
تصوير التقنيات الحديثة
تخطيط المسار المبتكر والهيكل الديناميكي للكلب الروبوتي يعالج القيود المعروفة للروبوتات السابقة، باستخدام الأرجل ذات المفاصل الثنائية، يمكن للكلب أن يحاكي التجديف الطبيعي للكلاب الحقيقية، مما يجعله أكثر قدرة على الأداء لكلاً من سباحة سريعة وتخطيط مشي واقعي.





